Month: February 2014
-
PiDoor – Security Door Lock v2
Some readers may recall my old security door lock, which I made about a year ago. It was controlled with just a single AVR, which proved very inflexible. Though in theory it was capable, it was very limited unless I spent a lot of time and effort interfacing with an internet connectivity module. While that…
-
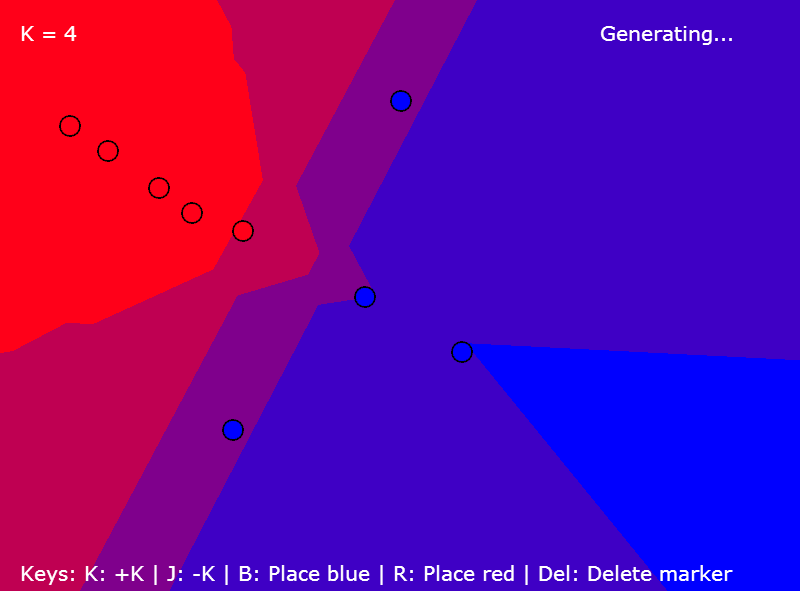
K-Nearest Neighbours
I spent a few hours over the past few days working on an interactive K-NN (K-Nearest Neighbours) classification map. Try it out here: http://projects.bitnode.co.uk/KNN/ If you’re unfamiliar with it, K-NN is a part of machine learning. Specifically, it can be used for classification (I.E does this belong to x or does it belong to y).…